หุ่นยนต์อุตสาหกรรม (Industrial Robot) คือ เครื่องจักรกลที่ถูกใช้งานในกระบวนการต่างๆ ของอุตสาหกรรม มีทั้งขนาดเล็กและขนาดใหญ่ ควบคุมด้วยมนุษย์และระบบอัตโนมัติ หุ่นยนต์อุตสาหกรรมมักมีการเปลี่ยนแปลงตามการทำงานของโรงงานเป็นหลัก กระนั้นก็ยังมีการแบ่งรูปแบบการทำงานของหุ่นยนต์เอาไว้ตามหลักการเคลื่อนไหวของหุ่น ดังนี้
ประเภทของหุ่นยนต์อุตสาหกรรม
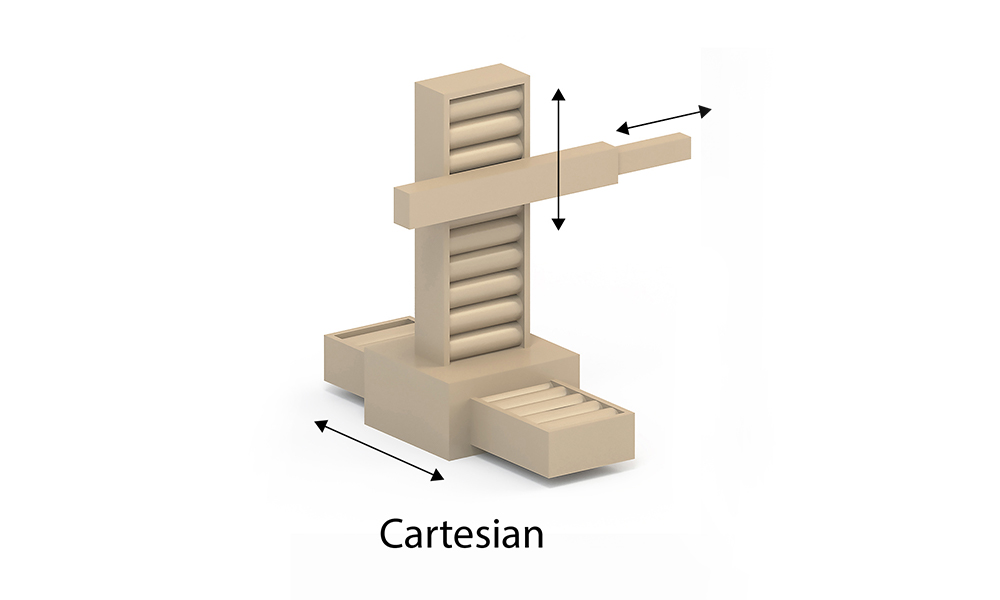
Cartesian Robot
Cartesian Robot (อีกชื่อคือ Linear Robot) เป็นหุ่ยนต์ที่เน้นการเคลื่อนที่เป็นเส้นตรงทั้ง 3 แกน ทำให้เป็นหุ่นยนต์ที่มีความแข็งแรงและมีประสิทธิภาพในการรับน้ำหนักมากที่สุดเมื่อเทียบกับหุ่นยนต์ประเภทอื่นๆ แลกกับการที่ต้องใช้พื้นที่ติดตั้งมาก และไม่สามารถใช้งานละเอียดอ่อนได้ดี
การใช้งาน Cartesian Robot ที่ดีที่สุดคือการประยุกต์ใช้เข้ากับงานประกอบชิ้นส่วนต่างๆ งานขนย้ายสิ่งของ โดยการทำงานที่เหมาะสมจะขึ้นอยู่กับขนาดของ Cartesian Robot ด้วยนั่นเอง
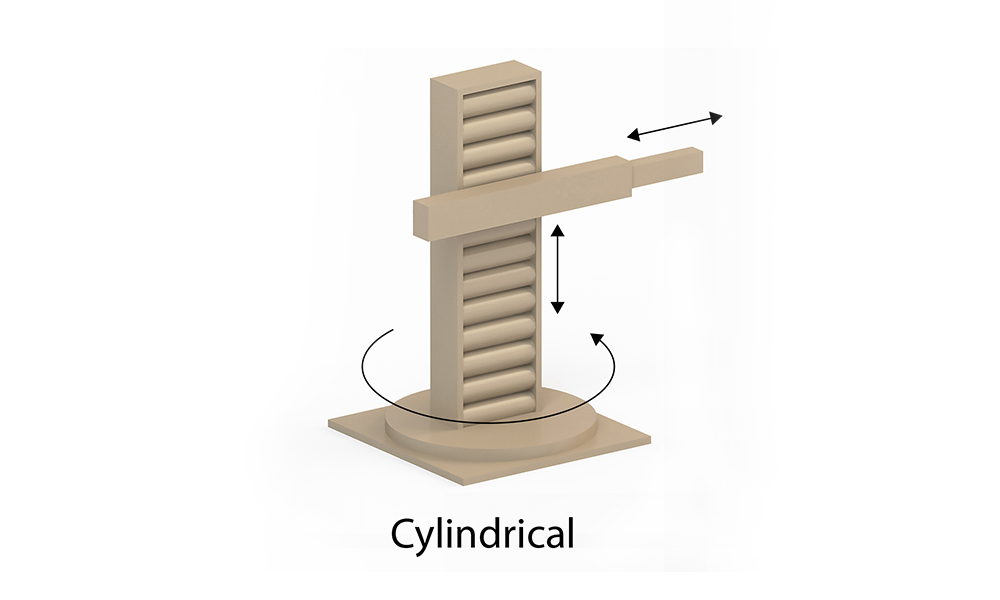
Cylindrical Robot
หุ่นยนต์รูปแบบ Cylindrical มีการเคลื่อนไหวคล้ายกับ Cartesian แต่มีความแตกต่างที่ตัวฐานของหุ่นจะเป็นรูปแบบการหมุนรอบแกน แทนที่จะใช้การเคลื่อนที่แบบเลื่อนเข้าเลื่อนออก
Cylindrical Robot ใช้ในงานยกจับ ขนย้ายสิ่งของ งานเชื่อม รวมถึงงานประกอบต่างๆ ที่เป็นงานที่มีความซับซ้อนต่ำ เน้นการทำงานที่รวดเร็ว เนื่องจากตัวของ Cylindrical Robot จะมีการทำงานที่ง่ายคล้ายคลึงกับ Cartesian Robot
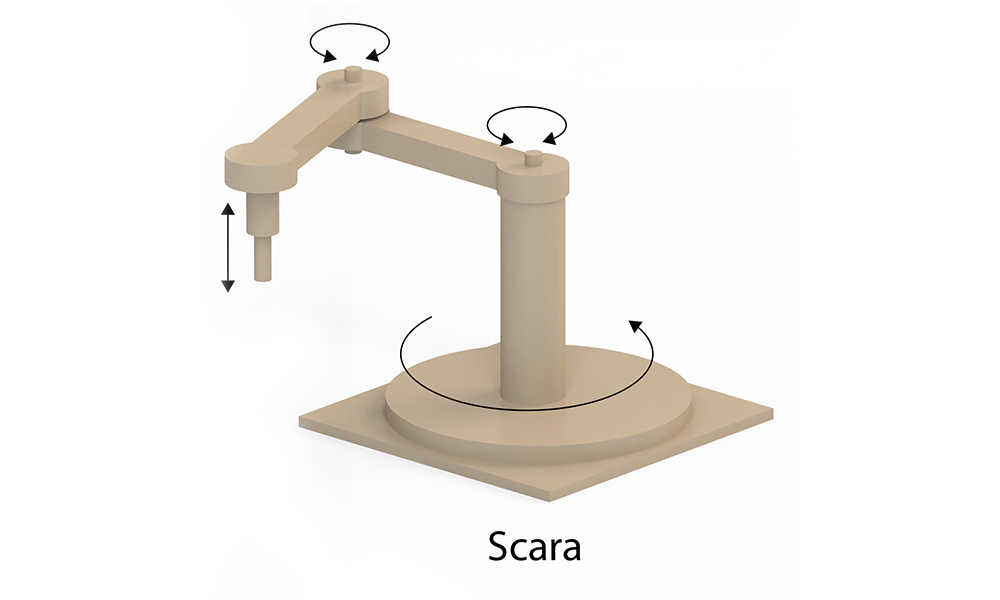
SCARA Robot
SCARA (Selective Compliance Assembly Robot Arm) เป็นหุ่นยนต์ที่มีการเคลื่อนที่แบบหมุน 2 จุด และบริเวณมือจับสามารถเคลื่อนที่ในแนวตั้งได้ดังรูป
รูปแบบการทำงานของ SCARA Robot จะไปกันได้ดีกับอุตสาหกรรมการประกอบชิ้นส่วนอิเล็กทรอนิกส์ขนาดเล็ก ที่เป็นงานละเอียดอ่อนและมีความแม่นยำสูง และงานบรรจุภัณฑ์สินค้าเล็กๆ ที่มีน้ำหนักไม่มาก ตัวของ SCARA ยังมีจุดด้อยอีกส่วนคือระยะการทำงานที่ค่อนข้างจำกัดเนื่องจากเคลื่อนที่ได้ด้วยการหมุนเท่านั้น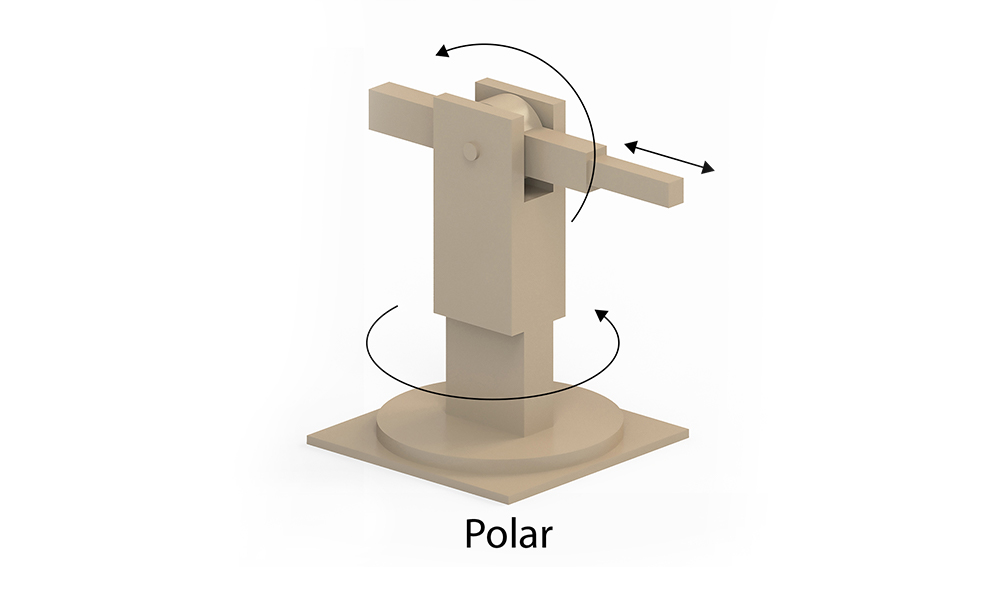
Polar Robot
Polar Robot หรือที่รู้จักกันในชื่อของ Spherical Robot คือหุ่นยนต์ที่มีแนวการเคลื่อนที่เป็นการหมุนสองจุด คือส่วนฐานและส่วนไหล่ของหุ่นยนต์ โดยที่ส่วนมือจับสามารถยืดหดได้ ตามรูปประกอบ
หุ่นยนต์ประเภท Polar นั้นสามารถทำงานประเภทหยิบจับชิ้นงาน รวมถึงงานเชื่อมรูปแบบต่างๆ ได้ดี จากการยืดของหัวจับและการหมุนของตัว ทว่าด้วยความซับซ้อนของหุ่นยนต์นี้เองทำให้การใช้งานบางประเภทอาจทำได้ยาก
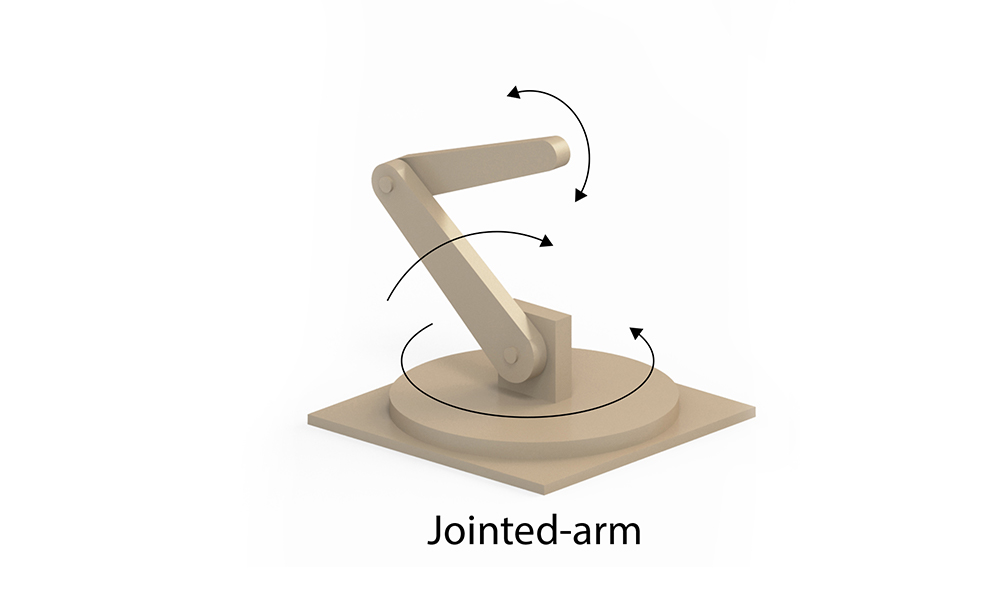
Articulated Robot (Jointed Arm)
หุ่นยนต์ประเภท Articulated (บางครั้งก็ถูกเรียกว่า Jointed Arm) เป็นหุ่นยนต์ที่ใช้การเลียนแบบการเคลื่อนไหวของแขนมนุษย์มากกว่าหุ่นยนต์ประเภทอื่นๆ โดยข้อต่อทั้งหมดจะเป็นรูปแบบหมุน (Revolute) 3 จุดขึ้นไป (อาจมีจำนวนข้อต่อมากถึง 10 จุดตามการออกแบบ) ทำให้สามารถเคลื่อนที่ได้ยืดหยุ่น ลื่นไหล ทำงานได้หลากหลาย
ด้วยคุณสมบัติการทำงานที่ครบครัน ทำให้ Articulated Robot มีการนำไปใช้งานหลายประเภท ตั้งแต่งานยกของธรรมดาๆ งานเชื่อม งานตัด จนถึงงานพ่นสีเลยทีเดียว ข้อเสียของหุ่นยนต์ประเภทนี้คือการควบคุมที่ค่อนข้างยาก จำเป็นต้องใช้ผู้เชี่ยวชาญหรือมีการวางระบบพื้นฐานเกี่ยวกับการใช้งานที่ดีอยู่แล้ว รวมถึงการเคลื่อนที่ที่ใช้ข้อต่อหมุน หากหุ่นยนต์ใช้วัสดุที่คุณภาพค่อนข้างต่ำจะทำให้การเคลื่อนที่ไม่ดีพอไปด้วย
นอกเหนือจากหุ่นยนต์รูปแบบหลักๆ ด้านบน ยังมีการสร้างหุ่นยนต์แบบ Custom ตามรูปแบบการผลิตต่างๆ เพื่อให้สอดคล้องกับโรงงานนั้นๆ มากที่สุด ทั้งนี้การสร้างหุ่นยนต์แบบเฉพาะย่อมมีค่าใช้จ่ายที่สูงกว่าทั้งจากการผลิตและการดีไซน์
สรุปบทความ
หุ่นยนต์อุตสาหกรรมในปัจจุบันมีความหลากหลายในการใช้งานเป็นอย่างมาก ตั้งแต่หุ่นตัวเล็กไปจนถึงหุ่นตัวใหญ่ ใช้ขนของจนถึงประกอบชิ้นส่วนอิเล็กทรอนิกส์ระดับมิลลิเมตร ดังนั้นผู้ประกอบการควรเลือกหุ่นยนต์ที่เหมาะสมกับไลน์การผลิตของตัวเอง และใช้อุปกรณ์ร่วมเช่น IoT ให้สอดคล้องกับการทำงานทั้งหมดของโรงงาน



ไม่มีความคิดเห็น:
แสดงความคิดเห็น